G
Best posts made by george
-
RE: 请问coolpi 4b 电源输入功率多大合适,有电流保护吗?posted in Peripheral
@night 机器TYPEC前端电源芯片耐压可以达到28V,极限可以到34V,所以你的适配器规格没有任何问题。
开发板的电源部分一直是我们设计最优先考虑的方向,所以前端第一级电源花了很多功夫,考虑到用户各种各样适配器的规格,最终选择目前国内少数几家真正能做车规级别电源方案的厂家。尽量保证前端电源稳定可靠。
-
ubuntu22.04一键安装ROS2环境posted in Ubuntu
root登录shell键入如下命令:
root@ubuntu:/# wget http://fishros.com/install -O fishros && bash fishros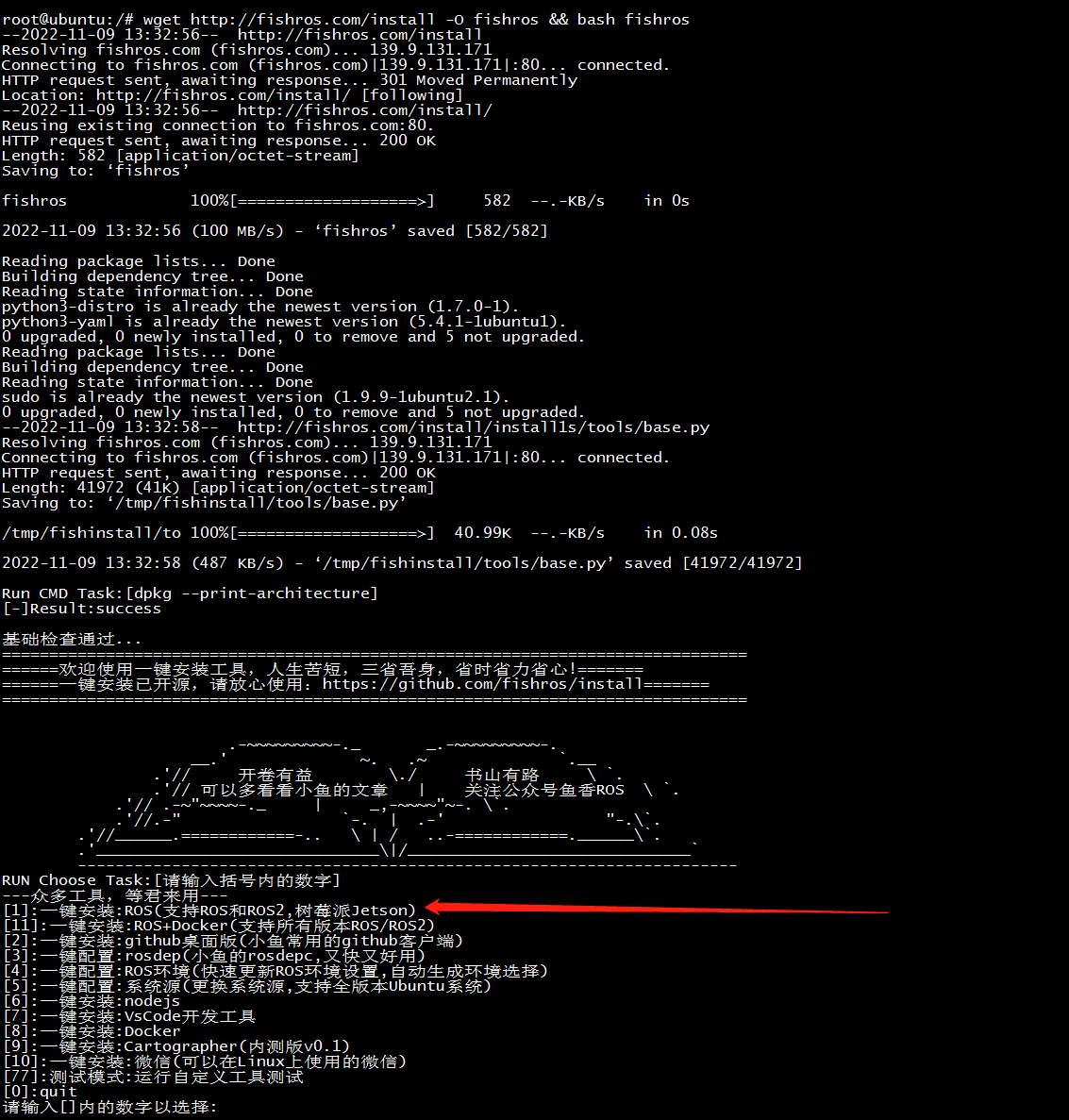
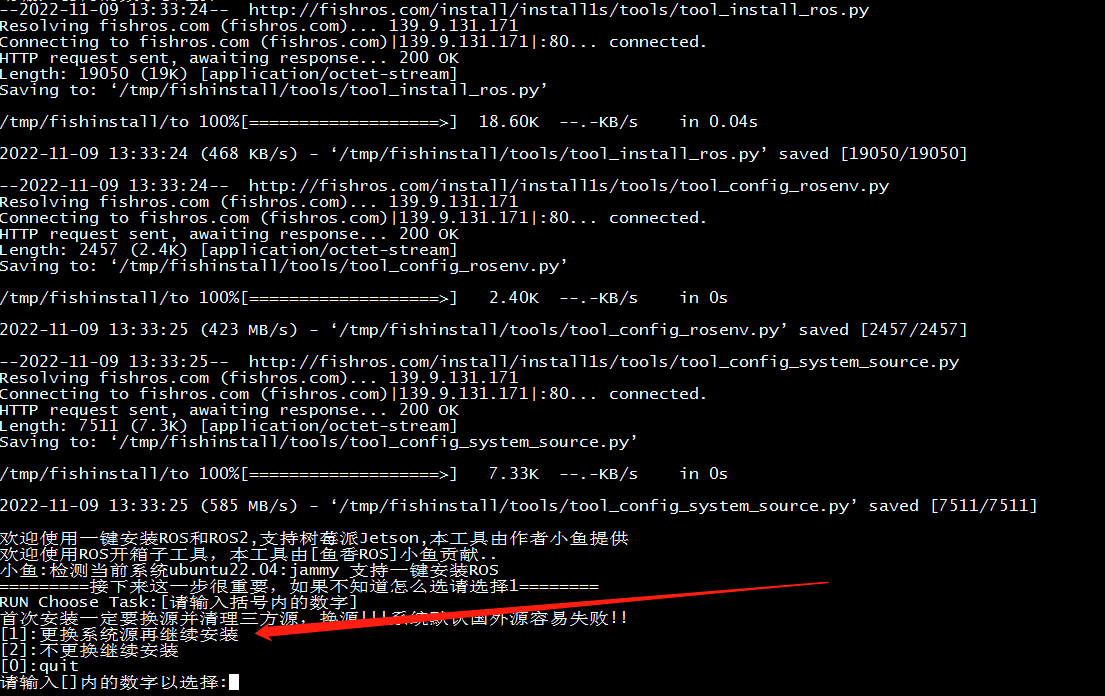
选择更新源速度会大幅度提高
选择humble

选择桌面版

安装成功界面
简单测试:
两个shell终端分别输入下面两条指令$ros2 run demo_nodes_py listener $ros2 run demo_nodes_cpp talker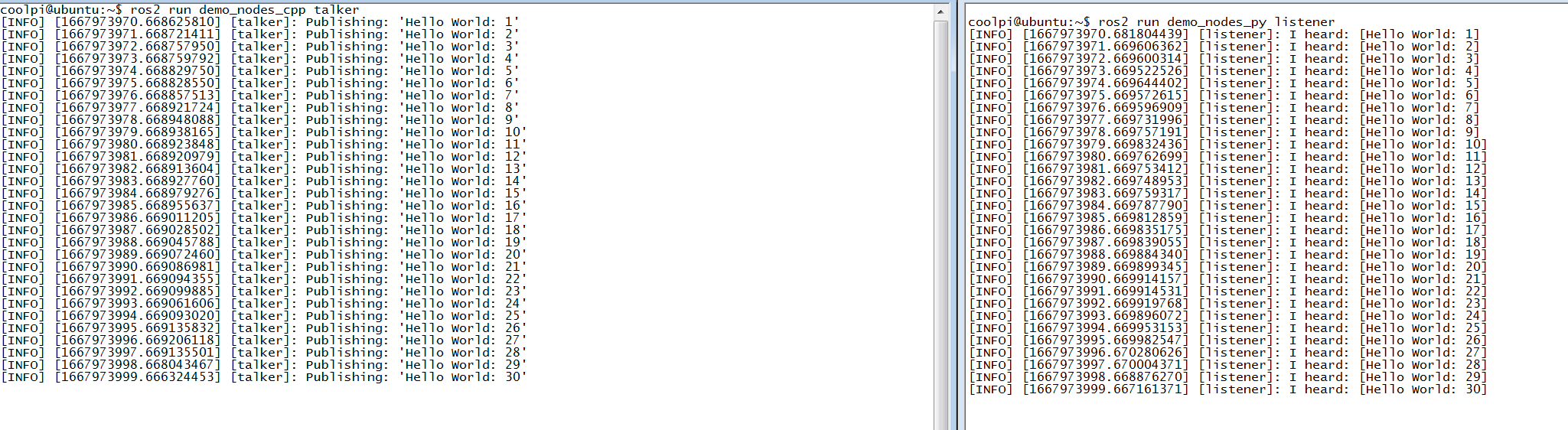
小乌龟测试:
两个shell终端分别输入下面两条指令$ ros2 run turtlesim turtlesim_node $ ros2 run turtlesim turtle_teleop_key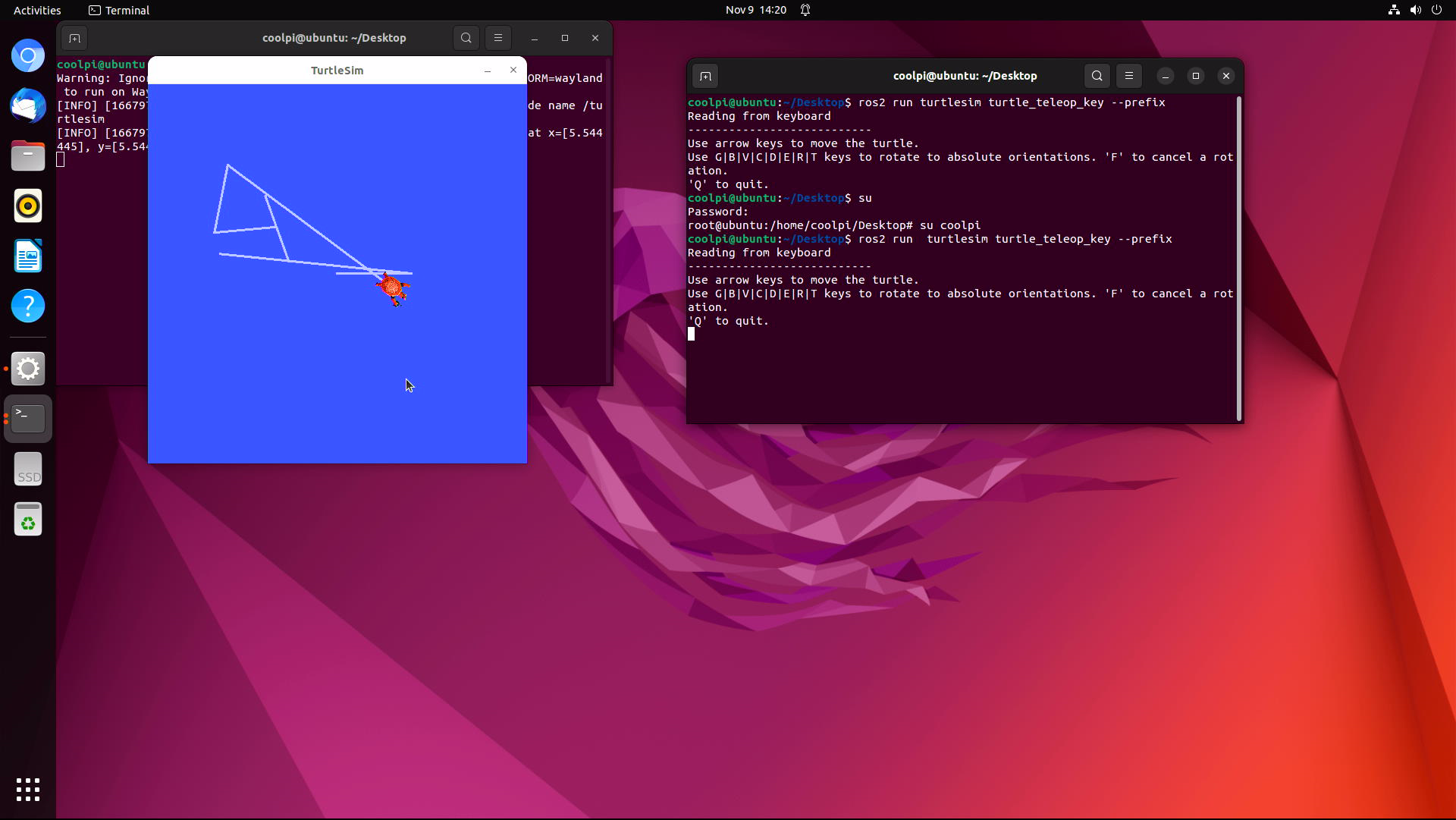
-
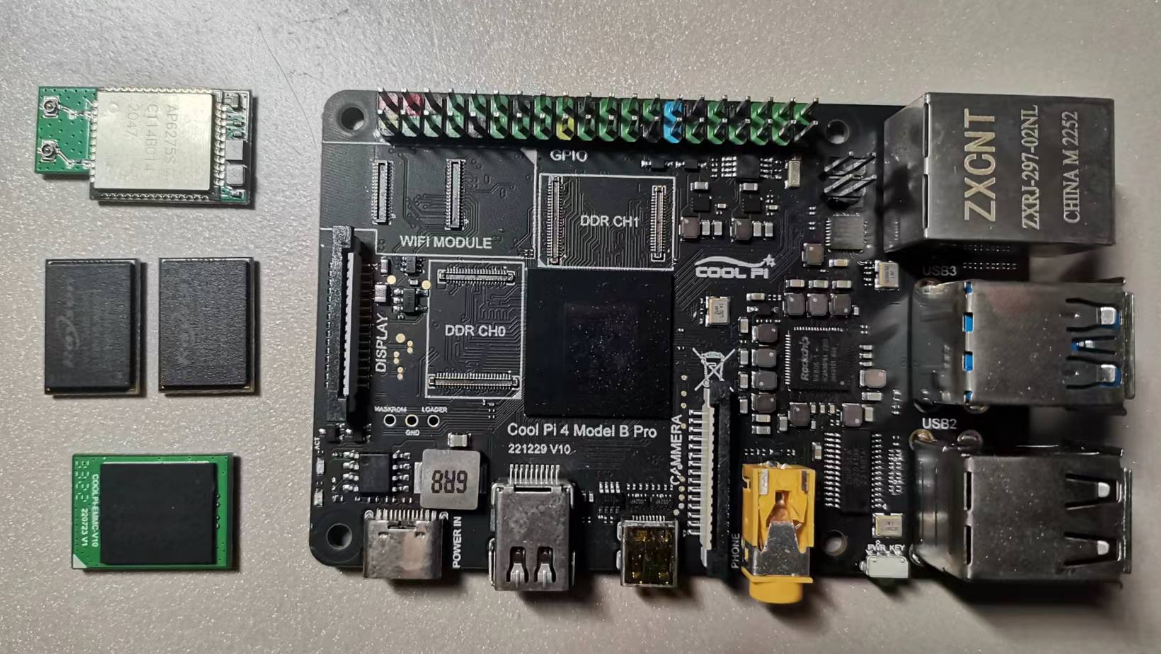
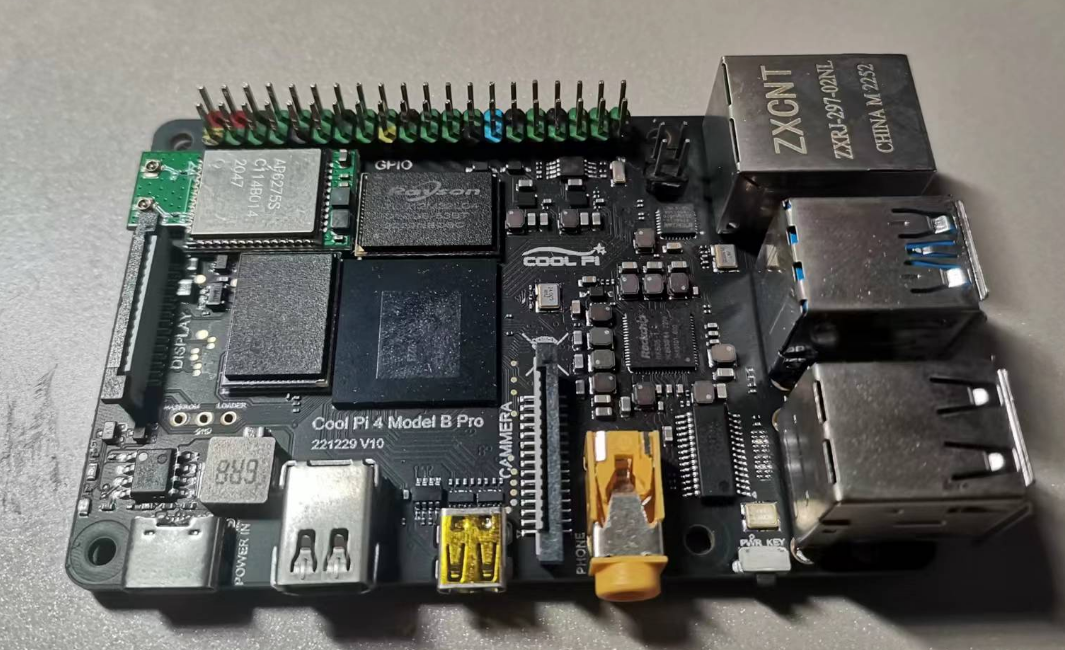
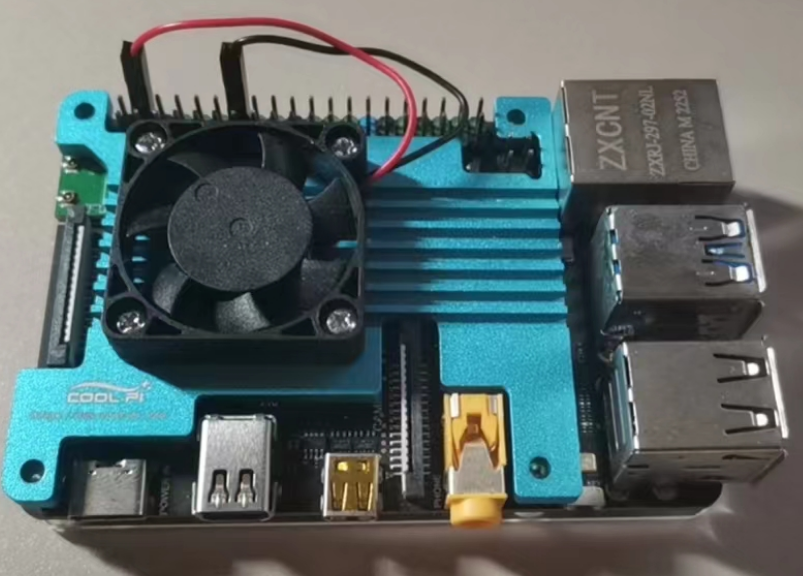
CoolPI 4B-PRO Product Introductionposted in News
-
Picture first
-
4G-32G Memory Capacity Replacement.
-
The WIFI module is replaceable and supports models such as 2.4G 5G WIFI6.
-
EMMC module supports up to 256G.
-
-
RE: 自定义bootloaderposted in Pi 4B
@zehui
启动的流程是一样的,目前uboot的结构如下:FIT description: FIT Image with ATF/OP-TEE/U-Boot/MCU Created: Wed Feb 28 09:32:41 2024 Image 0 (uboot) Description: U-Boot Created: Wed Feb 28 09:32:41 2024 Type: Standalone Program Compression: uncompressed Data Size: 1389728 Bytes = 1357.16 KiB = 1.33 MiB Architecture: AArch64 Load Address: 0x00200000 Entry Point: unavailable Hash algo: sha256 Hash value: e8eeabe5b2891390396b4cb77a33c5bb8da03b1da33a64274a077cf386f2b5aa Image 1 (atf-1) Description: ARM Trusted Firmware Created: Wed Feb 28 09:32:41 2024 Type: Firmware Compression: uncompressed Data Size: 200008 Bytes = 195.32 KiB = 0.19 MiB Architecture: AArch64 Load Address: 0x00040000 Hash algo: sha256 Hash value: c902200be1343fe569e54778c286005b1c6163606664c463a24d787be4376966 Image 2 (atf-2) Description: ARM Trusted Firmware Created: Wed Feb 28 09:32:41 2024 Type: Firmware Compression: uncompressed Data Size: 24576 Bytes = 24.00 KiB = 0.02 MiB Architecture: AArch64 Load Address: 0xff100000 Hash algo: sha256 Hash value: 225d6bf0712f850648223365ba06a73ba5f6315fb8a9580f23ab48ece795f91e Image 3 (atf-3) Description: ARM Trusted Firmware Created: Wed Feb 28 09:32:41 2024 Type: Firmware Compression: uncompressed Data Size: 24576 Bytes = 24.00 KiB = 0.02 MiB Architecture: AArch64 Load Address: 0x000f0000 Hash algo: sha256 Hash value: aa71013e72d7ab4be264c1093b155ef06e65d0a263d552be25b13c8ddf285586 Image 4 (optee) Description: OP-TEE Created: Wed Feb 28 09:32:41 2024 Type: Firmware Compression: uncompressed Data Size: 465304 Bytes = 454.40 KiB = 0.44 MiB Architecture: AArch64 Load Address: 0x08400000 Hash algo: sha256 Hash value: 66e30bf9e879405a49797aaa6c08ca1c41aa325443e910af42e3df309e65909b Image 5 (kern-fdt) Description: cp4/uboot.dtb Created: Wed Feb 28 09:32:41 2024 Type: Flat Device Tree Compression: uncompressed Data Size: 141854 Bytes = 138.53 KiB = 0.14 MiB Architecture: AArch64 Hash algo: sha256 Hash value: ba43bc47ab29f0cbcba25658712ac3d3c6349a30486c76d5b720310e58f02de3 Image 6 (fdt) Description: U-Boot dtb Created: Wed Feb 28 09:32:41 2024 Type: Flat Device Tree Compression: uncompressed Data Size: 7065 Bytes = 6.90 KiB = 0.01 MiB Architecture: AArch64 Hash algo: sha256 Hash value: 987a71d492c0045c4964bbed7799da0eee5276a2b60b5a1335fc2d37fdfcf944 Default Configuration: 'conf' Configuration 0 (conf) Description: rk3588s-cp4 Kernel: unavailable Firmware: atf-1 FDT: fdt kern-fdt Loadables: uboot atf-2 atf-3 optee -
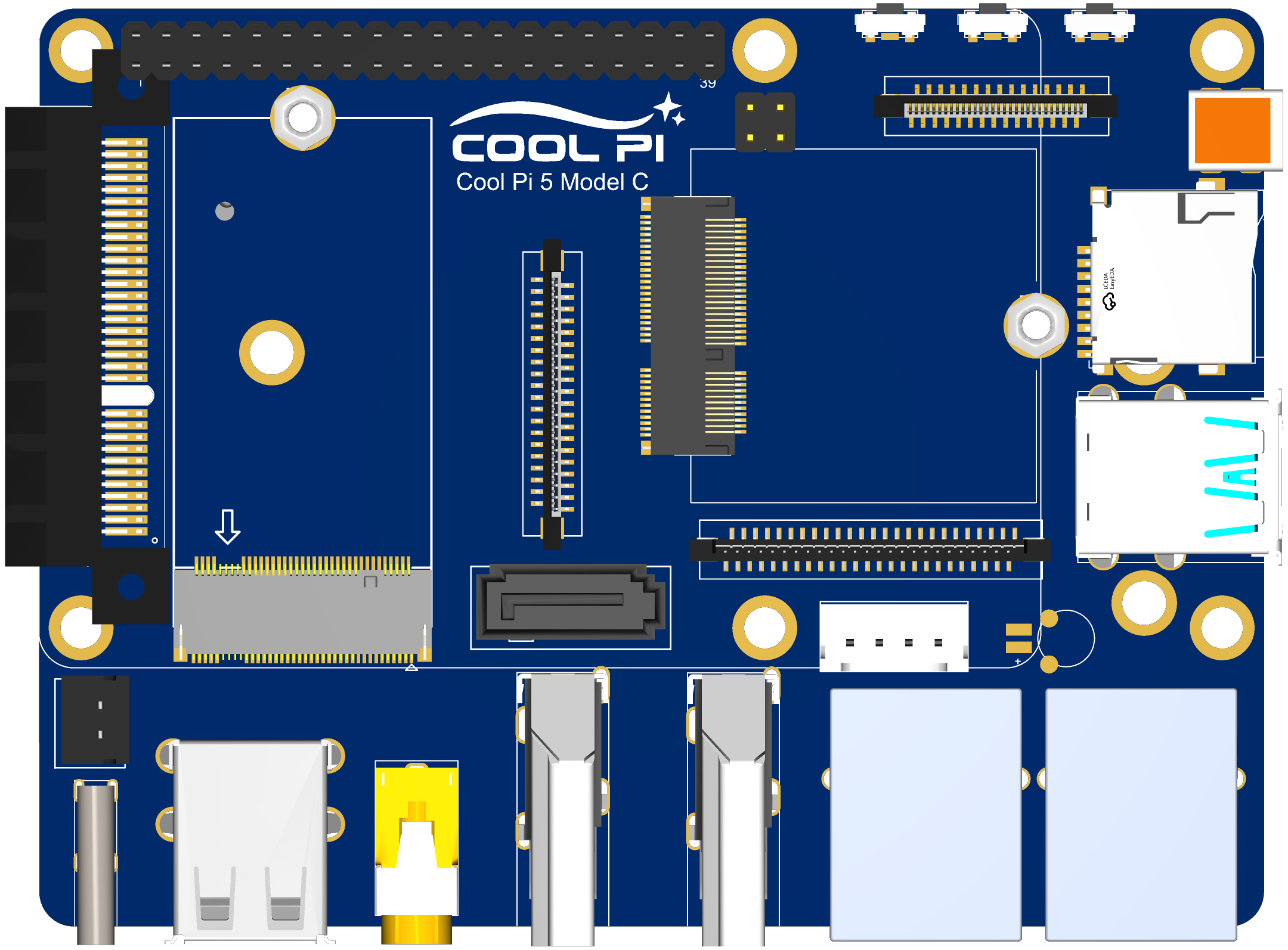
Introduction to COOL PI CM5 interfaceposted in Pi CM5
Top-level interface
-
The 2X20 pin interface is compatible with CP4 and integrates multiple UART, I2C, SPI, CAN and other functions.
-
Three function keys are PWR, RST and LOADER.
-
2X2 PIN POE connector,such as CP4.
-
30pin fpc vertical connector can directly drive standard 30PIN EDP interface LCD. Resolution up to 3840 * 2160
-
The MICRO HDMI-RX interface can support up to 4KP60 video signal input.
-
TF card with self-locking.
-
Two native USB3.0 interfaces, one of which supports OTG function.
-
Two Gigabit Ethernet interfaces, one of which supports POE function.
-
Two HDMI2.1 interfaces with a maximum resolution of 8K.
-
Stereo headphone stand with MIC input function.
-
Two native USB2.0 interfaces.
-
One TYPEC power supply interface, consistent with CP4.
-
The external power interface of 2PIN can support DC power input.
-
1 standard PCIE 4X connector, currently only supports PCIE3.0 2X/1X mode.
-
SSD interface, only PCIE-M2-2242 size hard disk is supported.
-
Standard 7PIN SATA3.0 interface, 4PIN power interface.
-
M.2 WIFI module interface, supporting multiple general WIFI modules.
-
Dual MIPI LCD interfaces support simultaneous output of two MIPI interface LCDs. The resolution of a single LCD is up to 1920 * 1200. It supports the MIPI DSC function.
-
Four independent MIPI camera interfaces support four camera inputs at the same time. It can be configured as 2X4LINE or 4X2LINE mode.
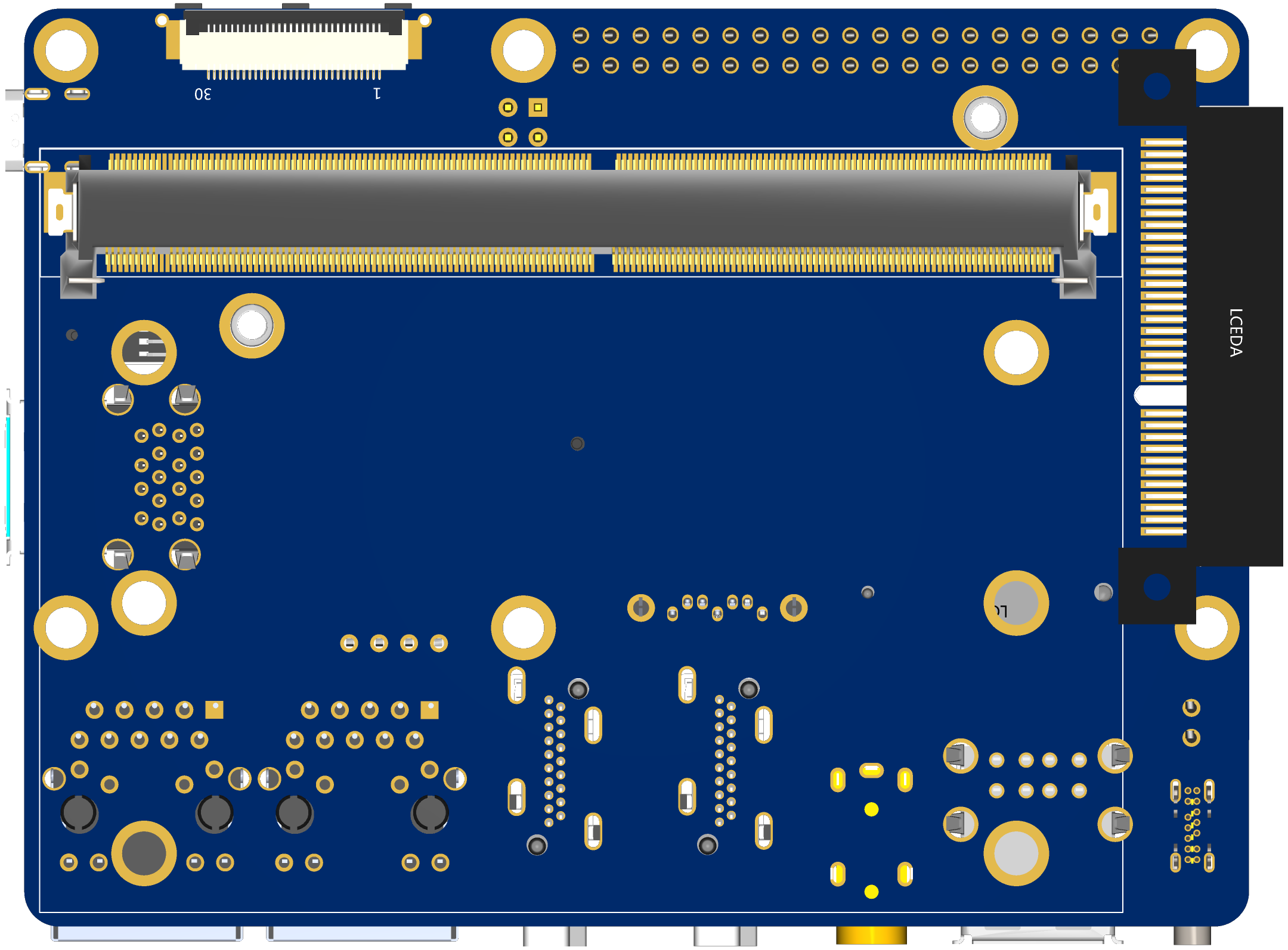
Bot-level interface
-
One 30PIN EDP interface can directly drive LCD output.
-
MXM 314PIN core board connector.
Welcome to put forward good suggestions. We can consider revising them.
-
-
How to upgrade the boot loader of coolpi 4b?posted in Pi 4B
If you need to boot armbian normally, you need to update the loader file to version 0104.
Follow the steps below to update the loader:
-
Download the latest loader file One Drive
![5594e1d4-3a7b-46fc-a7b5-2a9fe418dfc0-image.png]

-
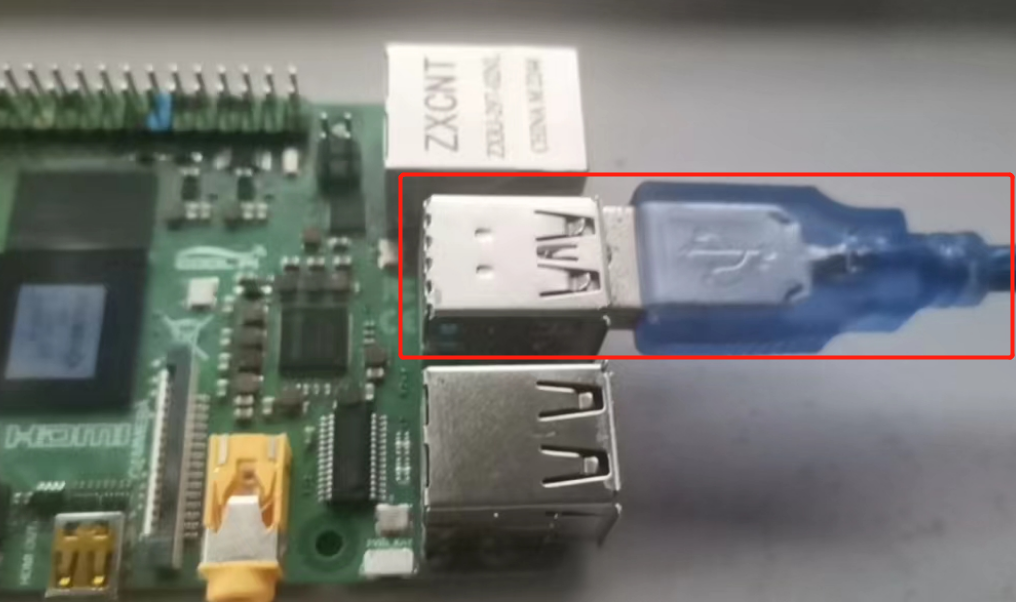
Short the 2 pins shown by the arrow.

-
The USB interface and computer connection.
-
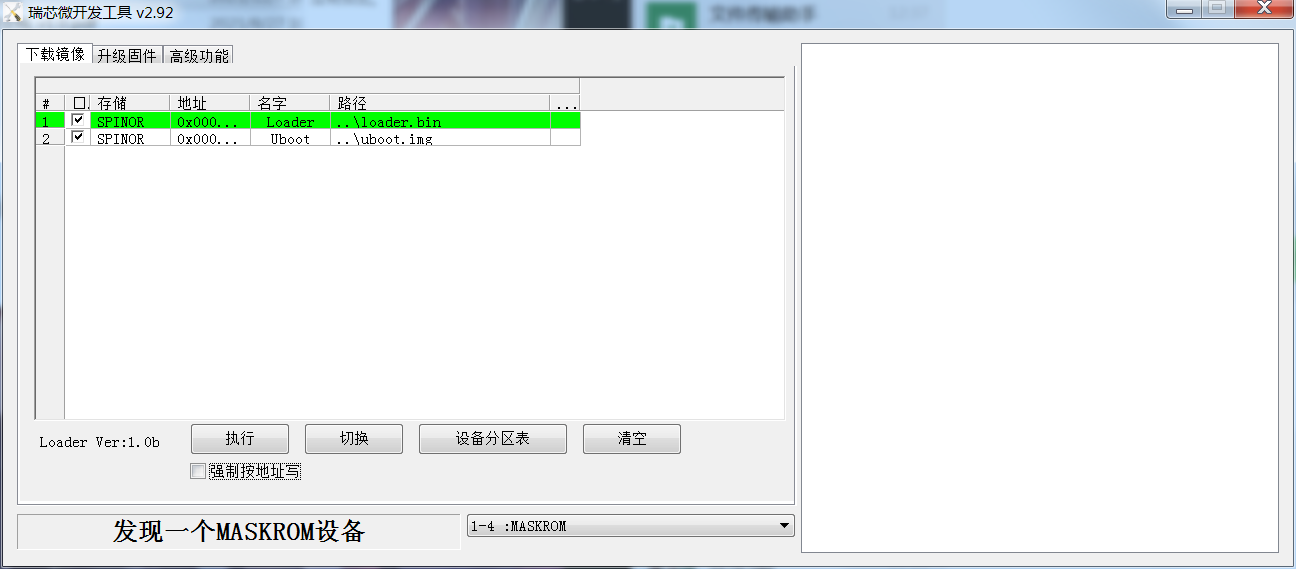
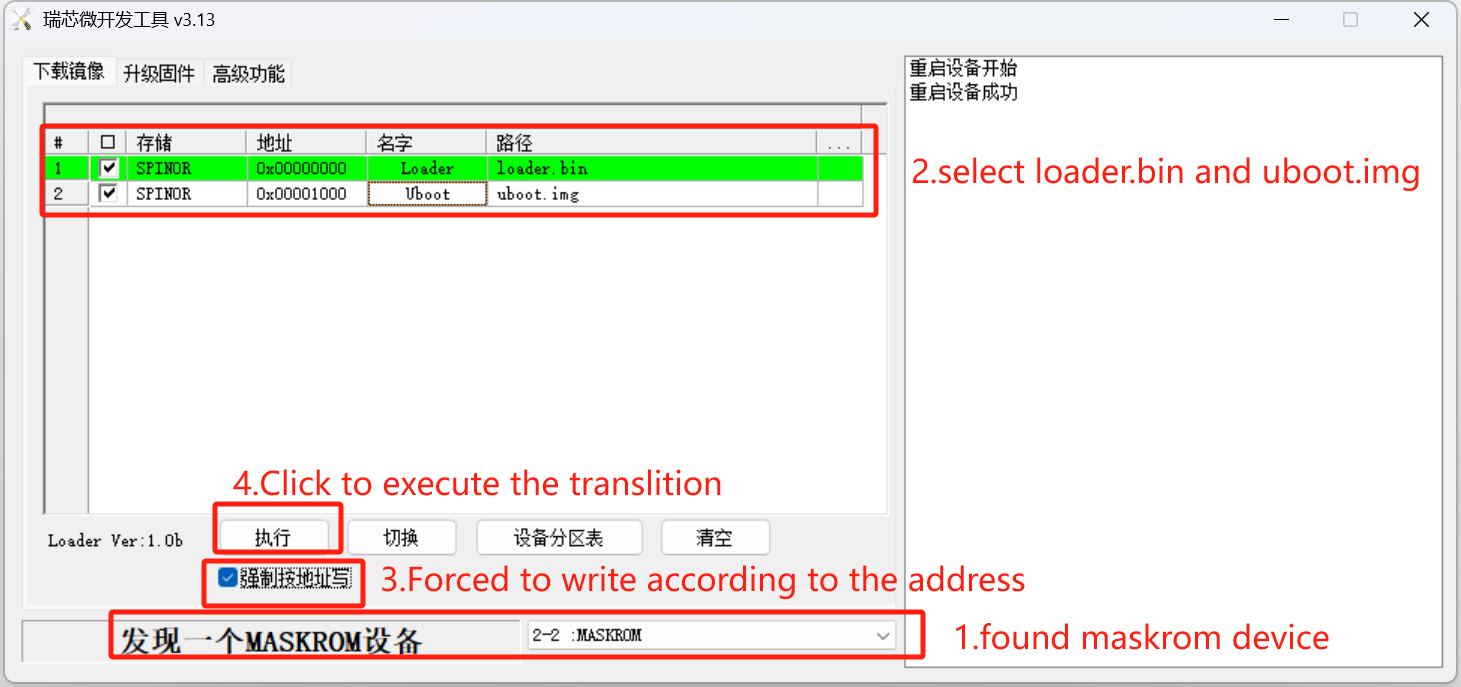
Plug in the power supply and open the upgrade software. The machine enters the maskrom upgrade mode.
-
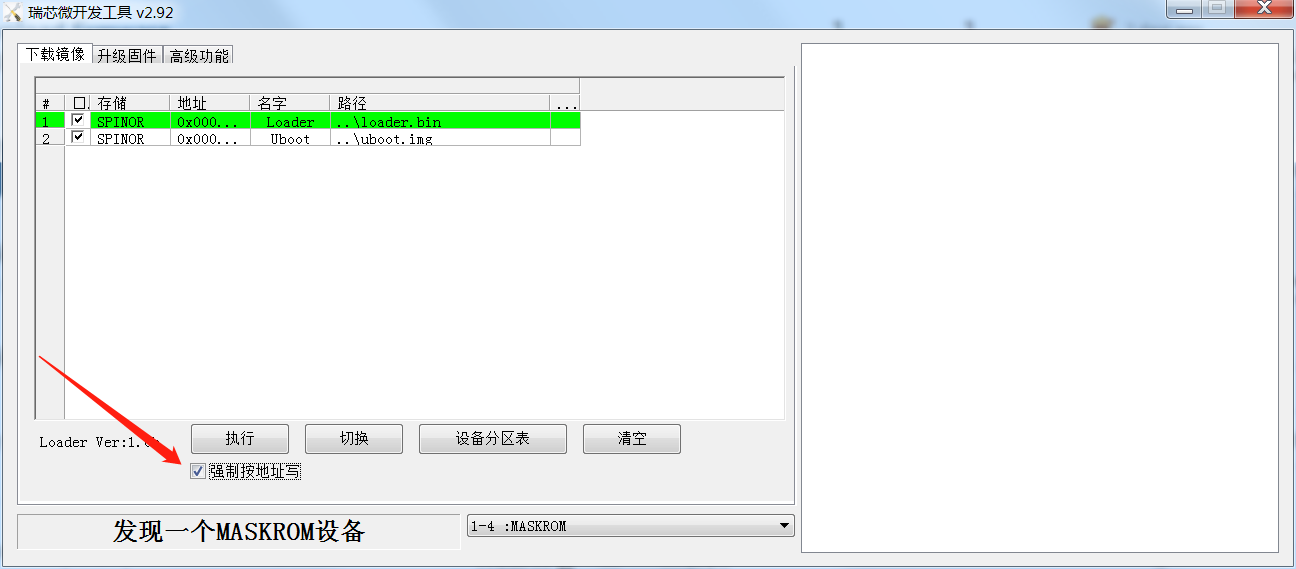
choose to write by address
-
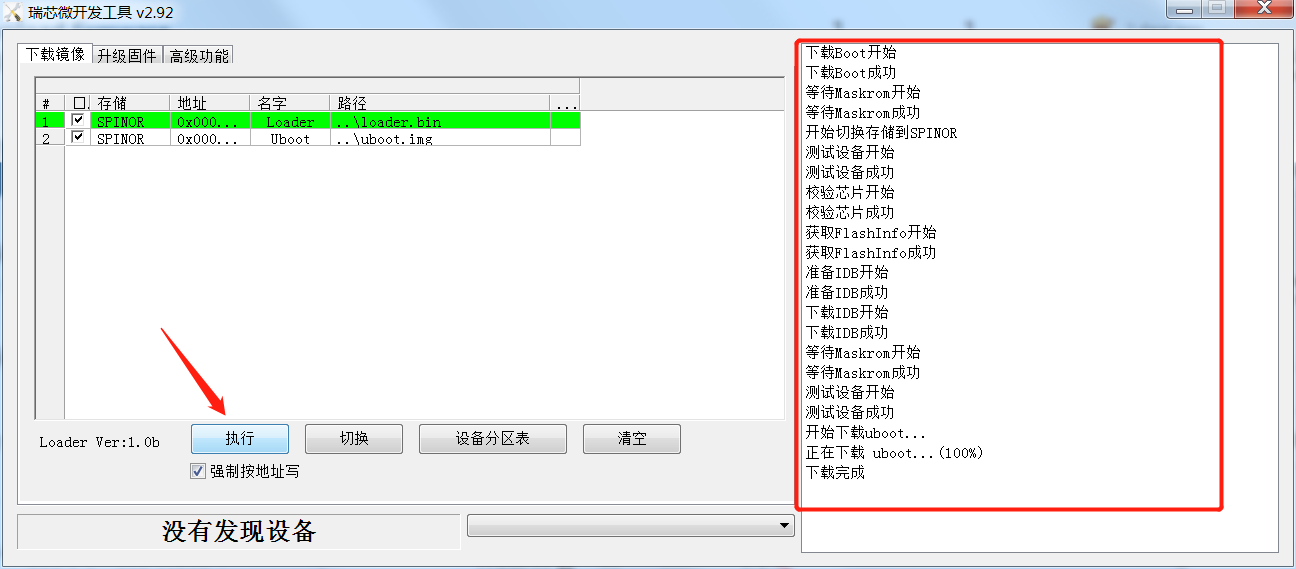
Click Execute to complete the loader update.
-
If the computer prompts that the USB driver cannot be found, please download and install the driver software first.One Drive
-


Latest posts made by george
-
Deploying Deepseek R7 model on coolpiposted in AI Algorithm
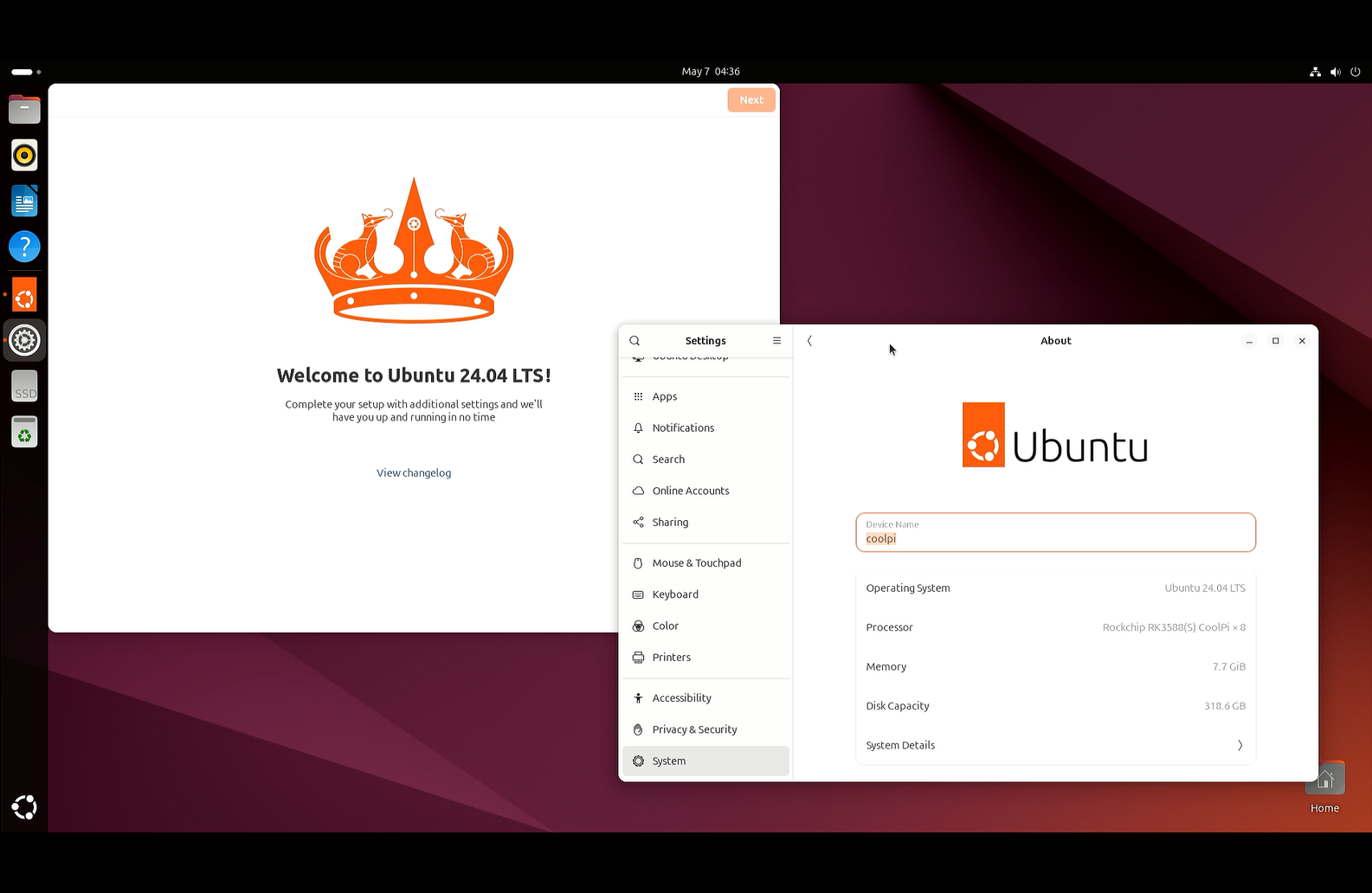
The R7 model is suitable for cp4b (16G) cm5-evb (32G) cm5-notebook (32G) machines, and low memory capacity machines are only suitable for the R1.5 model. The operating system defaults to Ubuntu 24.04.
- Update the system loader to the latest version
Download the latest loader file from Baidu Netdisk or OneDrive
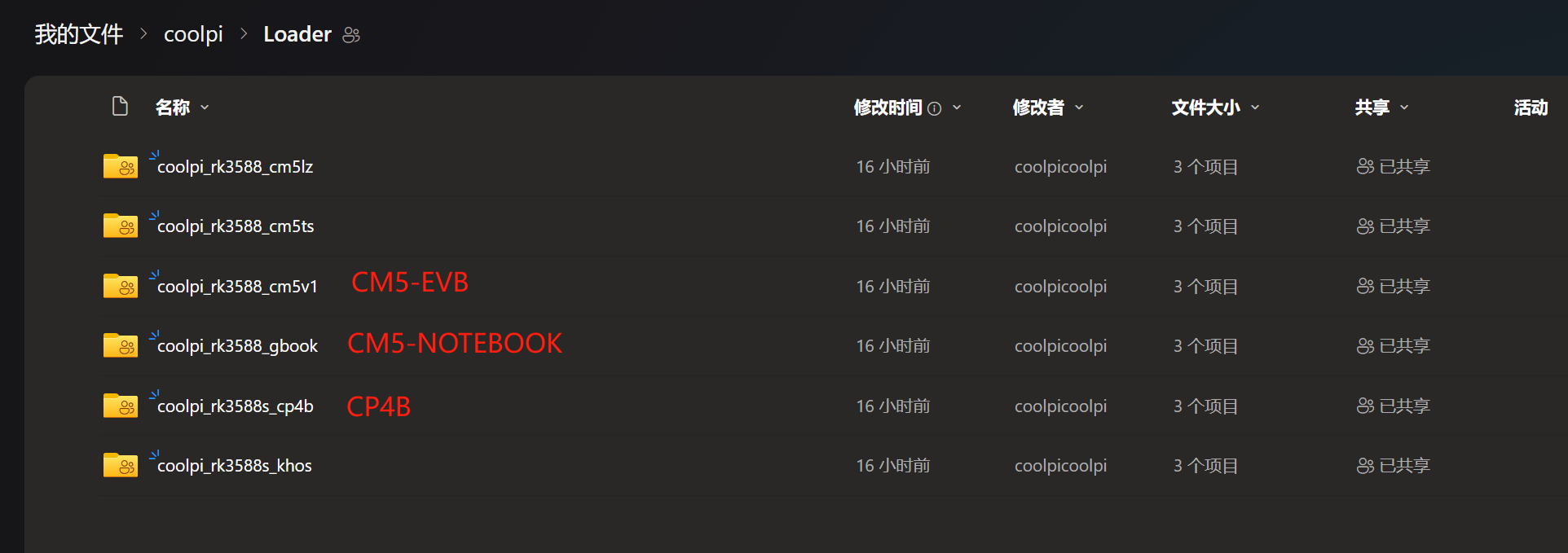
The machine enters Maskrom and then upgrades the loader according to the configuration shown in the following figure.
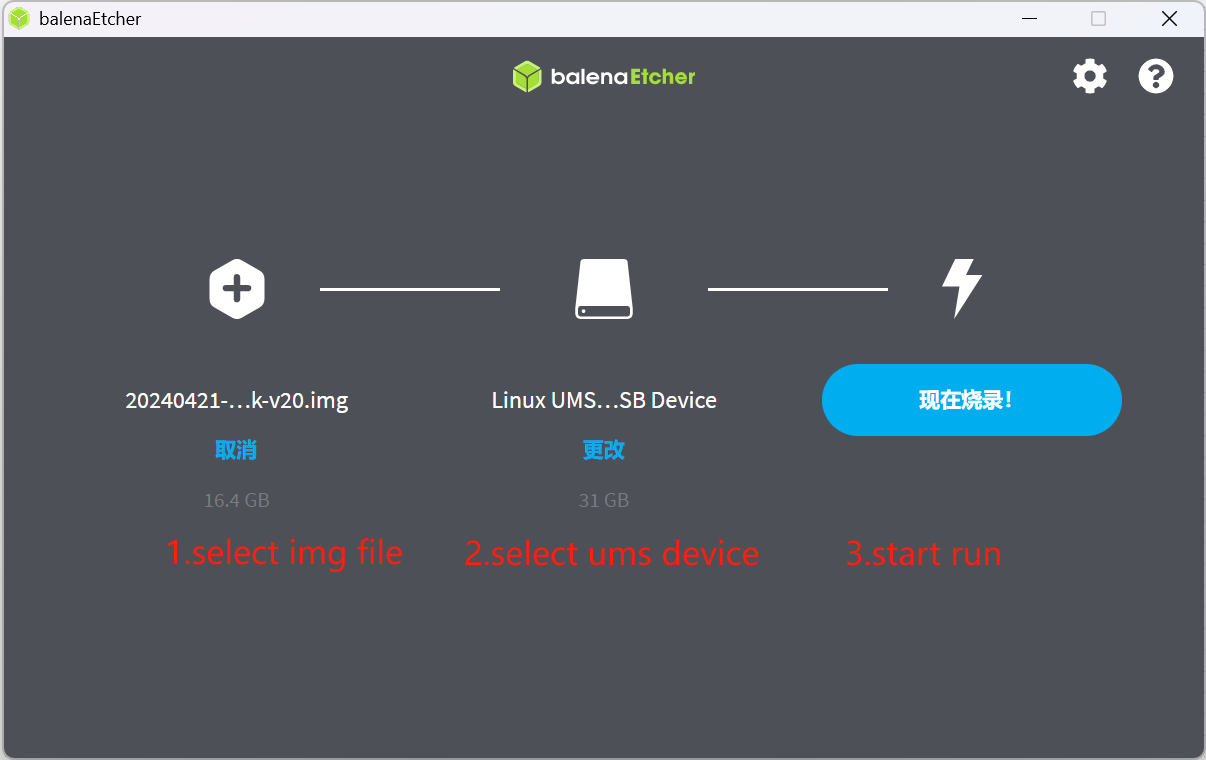
- Upgrade to the latest Ubuntu 24.04 image
Download the latest Ubuntu 24.04 image from Baidu Netdisk or OneDrive and upgrade. Currently, CP4B/CM5-EVB/CM5-Notebook uses a unified image file.

The machine enters UMS mode (run the command "sudo reboot UMS" in a shell window or press the power button multiple times after booting), and upgrade using Etcher.
Attention: The downloaded image needs to be decompressed before it can be used.
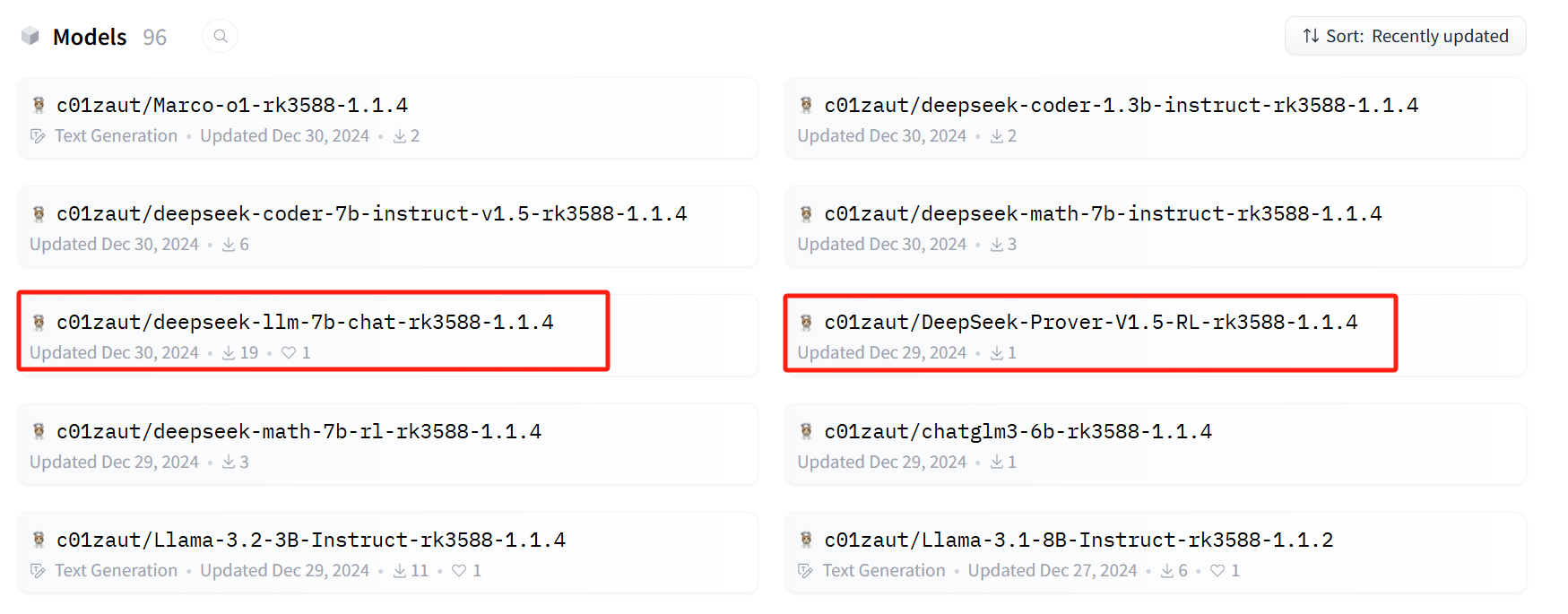
- Download Model
Obtain the converted rknn model from the following website. Deepseek can choose the 1.5b/7b model. Of course, if you are interested, you can convert it yourself. Tools and documentation will be provided later.
https://huggingface.co/c01zaut
- Synchronize RKLMM project
git clone https://github.com/coolpi-george/rknn-llm.git cd rknn-llm/examples/DeepSeek-R1-Distill-Qwen-1.5B_Demo/deploy/ ./build-linux.shCompiled successfully as shown in the following figure
tmjs@tmjs:~/share/coolpi-george/rknn-llm/examples/DeepSeek-R1-Distill-Qwen-1.5B_Demo/deploy$ ./build-linux.sh -- Configuring done (0.0s) -- Generating done (0.0s) -- Build files have been written to: /home/tmjs/share/coolpi-george/rknn-llm/examples/DeepSeek-R1-Distill-Qwen-1.5B_Demo/deploy/build/build_linux_aarch64_Release [100%] Built target llm_demo [100%] Built target llm_demo Install the project... -- Install configuration: "Release" -- Up-to-date: /home/tmjs/share/coolpi-george/rknn-llm/examples/DeepSeek-R1-Distill-Qwen-1.5B_Demo/deploy/install/demo_Linux_aarch64/./llm_demo -- Up-to-date: /home/tmjs/share/coolpi-george/rknn-llm/examples/DeepSeek-R1-Distill-Qwen-1.5B_Demo/deploy/install/demo_Linux_aarch64/lib/librkllmrt.sosudo cp install/demo_Linux_aarch64/lib/librkllmrt.so /usr/lib/aarch64-linux-gnu/- Load the model and run it
tmjs@tmjs:~/share/coolpi-george/rknn-llm/examples/DeepSeek-R1-Distill-Qwen-1.5B_Demo/deploy/install/demo_Linux_aarch64$ ./llm_demo /home/tmjs/share/DeepSeek-R1-Distill-Qwen-1.5B_RKLLM/deepseek-r1-1.5B-rkllm1.1.4.rkllm 100000 100000 rkllm init start I rkllm: rkllm-runtime version: 1.1.4, rknpu driver version: 0.9.7, platform: RK3588 rkllm init success **********************可输入以下问题对应序号获取回答/或自定义输入******************** [0] 现有一笼子,里面有鸡和兔子若干只,数一数,共有头14个,腿38条,求鸡和兔子各有多少只? [1] 有28位小朋友排成一行,从左边开始数第10位是学豆,从右边开始数他是第几位? ************************************************************************* user: 你好 robot: <think> </think> 你好!很高兴见到你,有什么我可以帮忙的吗?无论是学习、工作还是生活中的问题,都可以告诉我哦! user: 帮我写一首赞美春天的歌曲 robot: <think> 嗯,用户让我帮他写一首赞美春天的歌曲。首先,我得考虑用户的需求是什么。他可能是个学生,老师布置了这样的作业,或者他自己想表达对春天的喜爱。也有可能是喜欢音乐创作的人,想要一首有诗意、充满生机的作品。 接下来,我要分析用户可能没有明确说出来的深层需求。也许他希望这首诗不仅要有春天的意象,还要有情感上的共鸣,比如对自然美景的赞美,或者是对未来的美好期许。另外,用户可能还希望这首诗能够传达一种宁静而美好的氛围,适合在春天的早晨或午后听。 然后,我得考虑如何将春天的元素融入到歌曲里。春天通常与花开、绿草、鸟鸣、风声等相关联。这些元素可以用来营造出春天的氛围,同时让歌曲有节奏感和韵律感。比如,用轻快的鼓点来表现风的声音,或者用轻柔的旋律来描绘花开的美丽。 我还得考虑诗的结构和押韵方式。可能采用四句一节,每句七个字,这样比较符合中文诗歌的韵律。同时,每一句都要有独特的意象,避免重复,让整首诗更有层次感。 另外,用户可能希望这首诗不仅仅是描述春天,还能传达一种积极向上的情绪。因此,在用词和节奏上要显得温暖而充满希望。比如,使用一些积极向上的词汇,如“绿”、“欢”、“暖”等,来增强整体的感染力。 最后,我需要确保整首诗流畅自然,情感真挚。可能还需要加入一些比喻或拟人手法,让春天的景象更加生动形象。例如,把花朵比作小舞者,或者把风的声音比作春天的旋律。 总结一下,用户的需求是写一首赞美春天的歌曲,我需要结合春天的元素,使用富有节奏感和韵律的结构,传达出宁静而美好的氛围,并且情感真挚。这样既满足了用户的创作需求,也能让这首诗打动人心。 </think> ## 《春日》 花儿在枝头摇曳 轻盈的裙摆上 藏着春天的旋律 风儿轻轻吹过 带来泥土的气息 我听见了花开的声音 在耳畔流淌 每一朵花都是我的家 它们是春天的歌谣 在记忆里 等待着 我听见了 春天的节奏 在心上 它是一首永不停歇的诗 - Update the system loader to the latest version
-
RE: DIY Tabletposted in Peripheral
@anernest
These features are already supported on laptop products. -
RE: DIY Tabletposted in Peripheral
We are looking forward to your work and can provide technical support.
Thank you! -
RE: Cool Pi ARM Notebook Previewposted in News
@Chan
如下链接可以购买:
https://item.taobao.com/item.htm?id=769972910823&ns=1&pisk=geXbTQxh5q0b5baGZZqyR5x3Bvv65uyElctOxGHqXKpvW_sh5ErgiK5W5aQWkxr0iCL1oKdGgF825dsGRuzULJScmdv88yyFYmcgnpcxDn3w24K6CnebU7rAmdvT80kTTJscJJMnfrx92utwbn3OWhL8eUxwWfQ9kQ3JAHv9BrL2wl1OCGRDHKdyBG8lnq4xMha58HcV7KY9qzsdjslMsrKTanxvgE8mnFHkrhGx6IHtwLKDAmptHhe8eHKZDnptBQLJrhp9WNpTVLh754taGhIbcP7ev0Me4iLSBABYIITBvfksCsxvGOIvPgSPFnOXRQ7OETXAzGBVnQV-NdjPON1OJzl2k6tCPB5bRx_CohI6XZwnAUBffTOcaDDOVCTfwtdSXAIXEFdd1ZajiECVPBxJwcwH4w8RmtC7j4IA8E9v2QyLAgdOatAh3zHXp6j231QLzj8AOhIrsv8QMjhsVBD6Ver7Vfcif-ByL_w0G6RvqneUVugSsIKkVer7VfcMM3xATuZSPff..&priceTId=2147864117368238436881813eaab5&skuId=5340285281741&spm=a21n57.1.hoverItem.1&utparam={"aplus_abtest"%3A"3a39d1f4fb9e1d7bf8927ec6e59f0413"}&xxc=ad_ztc -
RE: CoolPi 4B OV5647 摄像头图片全黑posted in Pi 4B
@traceback
使用QV4L2测试一下节点,确实是否可以正常获取图像,除了型号以外,不同的sensor镜头也会对图像产生影响。 -
RE: Tried to update the boot loaderposted in PI CM5 Laptop
@Momo-0
This firmware is fine, you can try again a few times. If it still doesn't work, follow the following steps:
1.Remove the back cover of the machine. There is a button on the motherboard near the SSD connector。
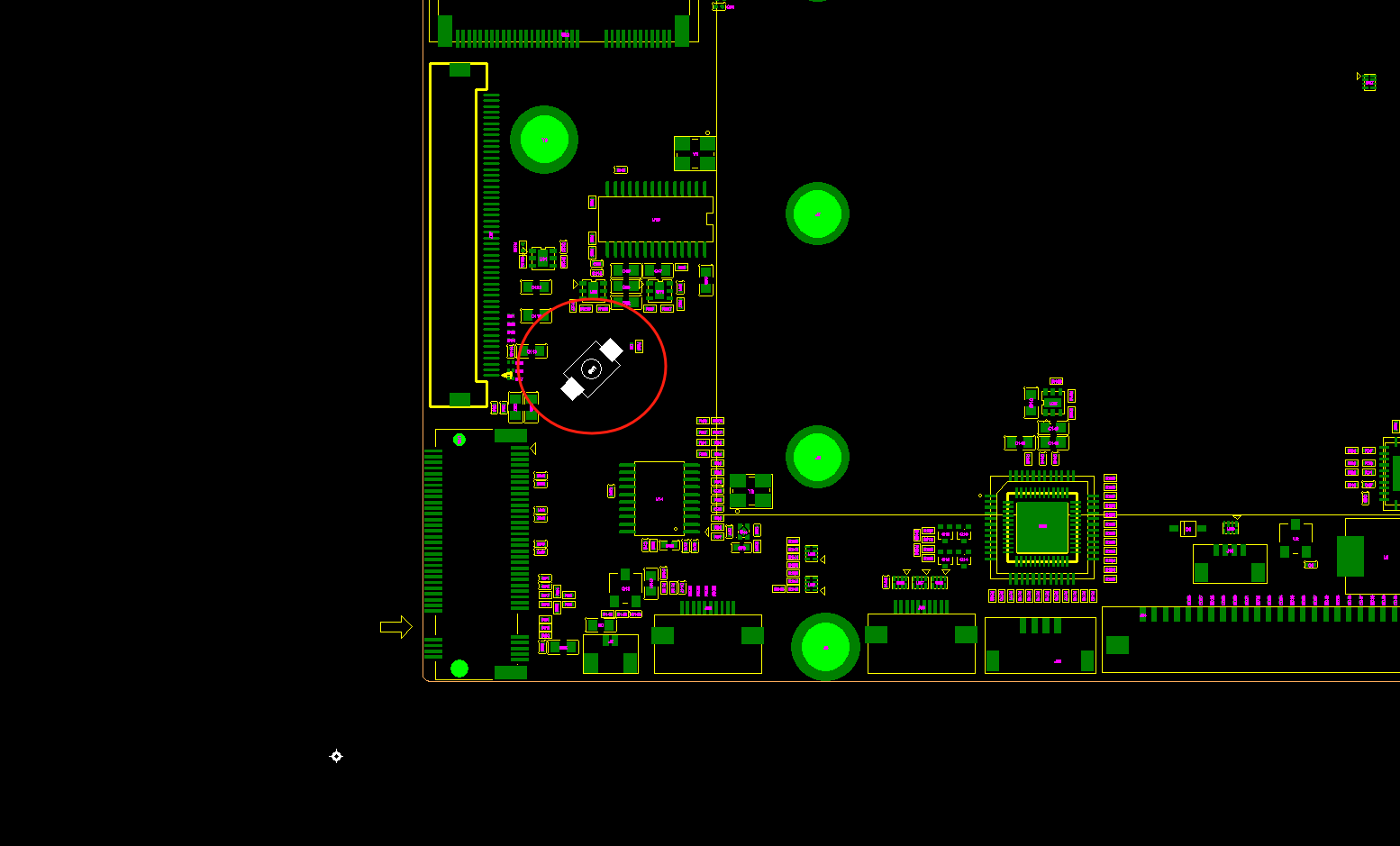
2.Press the button, then press the power button on the laptop to turn it on, and the machine will enter maskrom mode.
3.Burn in the firmware again using the previous method. -
RE: Cool Pi Cm5-Laptop Linux Quick Start Guideposted in PI CM5 Laptop
@Momo-0
Usually caused by incorrect recognition of file system partitions, pay attention to checking the cmdline. -
RE: Tried to update the boot loaderposted in PI CM5 Laptop
@Momo-0
Upgrade the loader using the attachment compressed file as shown in the following figure.
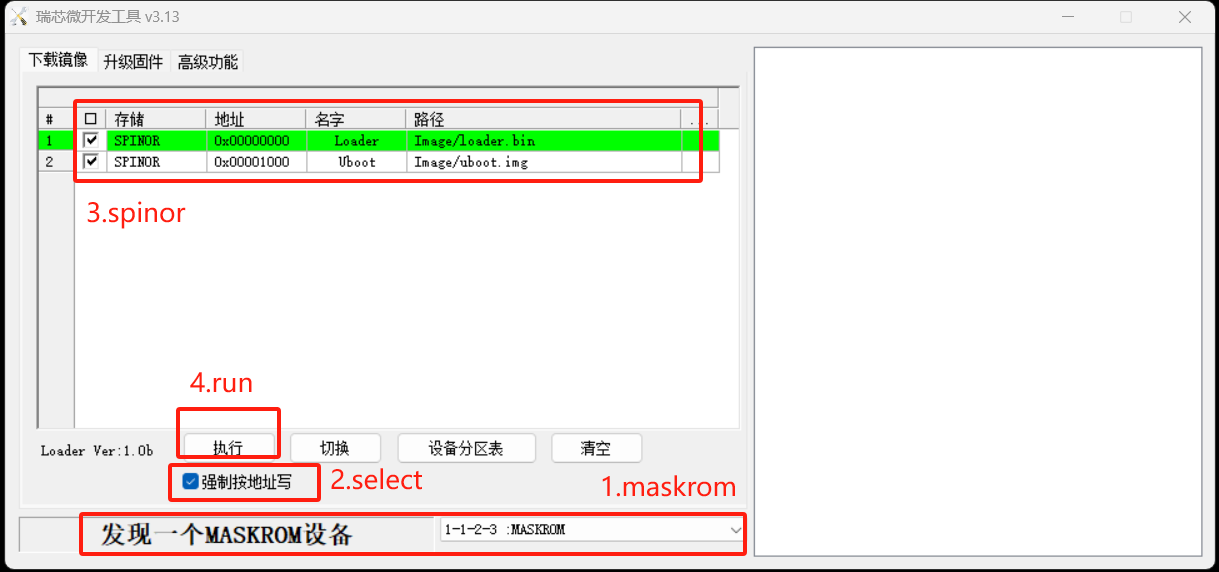
RKDevTool_v3.13_for_window_1.17.113.rar